автор arhimed Пн 29 Ноя 2021 - 23:39
автор arhimed Пн 29 Ноя 2021 - 23:39
bsv_stal@mail.ru пишет:разницы нет, вертикально стоят камеры или горизонтально.
Если вы обычной камерой (например с телефона или планшета) будете фотографировать лицо человека и хотите, что бы четче было (с прыщиками). То вы наверняка подойдете поближе, что бы лицо по максимуму вместилось ,... и еще крутить будете, что бы уж точно по максимуму. Или лист формата А4 с текстом фоткать будете, то уж точно повернете так, что бы побольше влезло.
Значит и 3Д камеру выгоднее так разместить, что бы зелененького там было побольше, а пустых мест поменьше.
И еще. Для тех кто калибрует или сканирует несколькими камерами.
Когда камеры видят общую поверхность, то в обработку (в реконструкцию) отправляется не все "зелененькое", а часть общего делится. Т.е. не выгодно, когда общего меша - много.
Вот для того, что бы по максимуму использовать все камеры и нужно думать как их получше и повыгоднее расположить.
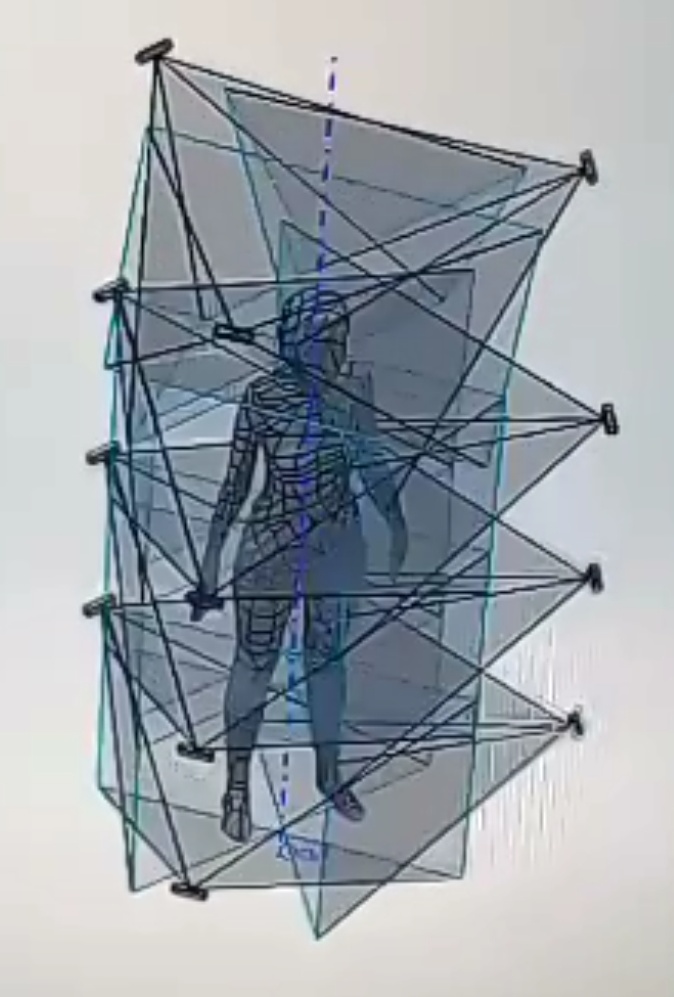
Если к примеру четыре кинекта (и подиум), то можно попробовать показывать камерам клиента вот так
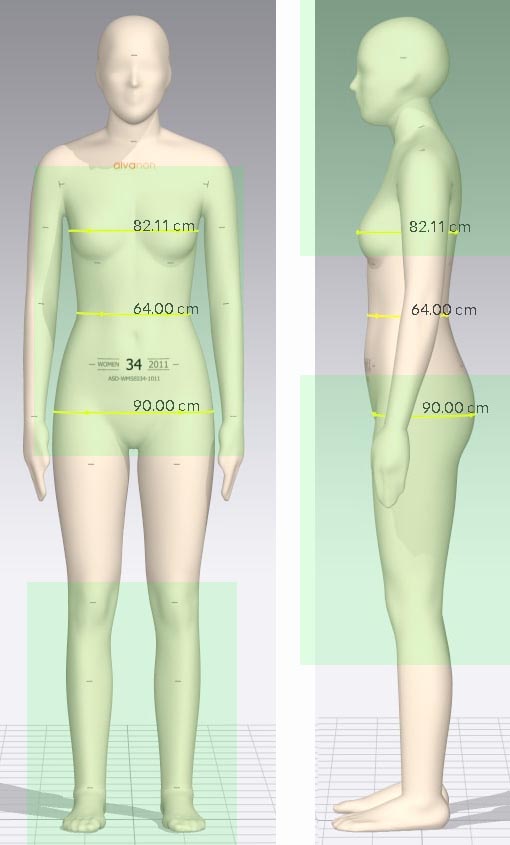
Зеленым полупрозрачным прямоугольником выделил 4 зоны. Каждую видит одна камера. Практически обхватывает сразу четверть (и это лучше для точности обхватов). Калибровочный лист в таком случае каждая камера будет видеть под углом 45 градусов (еще допустимо). Хотя тут тоже нужен полный оборот подиума.